地平线4等级规则
沈穆18191136081…… 请点击输入图片描述 极限竞速:地平线4无法更新怎么办 1、网络问题 如果显示网络错误,那么就是网络问题了,换个网络试一下,最好是稳定的wifi环境下更新. 2、设备不兼容 如果大家可以成功更新,但是在手机上打开游戏的时候,却显示进不去,那么可能是手机不兼容,最好是选择配置比较高的手机,这样才能更加流畅的玩耍. 3、卸载后下载最新版 如果是在更新了之后,还是进不去游戏的话,建议重新下载安装包,因为新下载的安装包不需要更新,就是最新版了,这样就可以跳过更新进入游戏了!
@蒲的5730:《地平线4》终极版和标准版区别是什么?
沈穆18191136081…… 《地平线4》标准版和终极版都包含游戏本体和方程式飘逸车辆包,终极版比标准版多了车辆通行证、无敌邦德车辆包、VIP、财富岛和其他一系列的亮点.《极限竞速:地...
@蒲的5730:s4的等级限制是什么? -
沈穆18191136081…… 首先,等级需求改变.当S4开始时,S3物品将减少个人等级和队伍等级需求为:肩膀:1950武器:1800新的S4物品的最低个人等级和队伍等级需求为:肩膀:2200武器:2050头:1700衣服:1600腿:1550手套:不需要副...
@蒲的5730:《极限竞速:地平线4》对电脑配置要求高吗? -
沈穆18191136081…… 《极限竞速:地平线4》最低配置为i3-4170 3.7GHZ,或者I5 750 2.67GHZ,内存要求最低要求为8gb,这基本是游戏的标配配置,推荐配置使用为12GB,这也是未来游戏的趋势,对于显卡要求,最低配置使用GTX650TI或者GTX740这种入门级...
@蒲的5730:奇虎问答有多少个等级! -
沈穆18191136081…… 目前官方公布的FAQ里面是40级 奇虎问答等级规则: 等级 经验值 1 0 2 5 3 10 4 30 5 80 6 170 7 300 8 470 9 680 10 930 11 1220 12 1550 13 1920 14 2330 15 2780 16 3270 17 3800 18 4370 19 4980 20 5630 21 6320 22 7050 23 7820 24 ...
@蒲的5730:地平线4解锁花名册条件 -
沈穆18191136081…… 地平线4解锁花名册条件:玩家第一次进入游戏会有新手指导流程,指导流程过完之后,就可以去完成该季节的所有赛事,完成之后再更换季节,直到四个季节赛事全部完成,并且玩家等级到达20级,就会解锁地平线花名册.方法如下: 电脑:联想电脑天逸510S. 系统:Windows10. 软件:极限竞速地平线41.468.304.0. 1、打开地平线4,点击游戏界面的开始赛事选项. 2、点击车库,选择比赛用的赛车. 3、进入挑战界面,根据地图,开始挑战. 4、完成挑战任务,结束游戏即可获得花名册奖励.
@蒲的5730:星星,月亮,太阳升级所需时间和规则是什么???
沈穆18191136081…… 1颗星星需要5天时间.(但是你只要每天连续挂2小时就可以顶1天了) 4颗星星升一个月亮,但是这时候1颗星星就要21天了. 4个月亮升1个太阳. PS:1颗星1级,1个月亮4级,1个太阳16级.
@蒲的5730:贴吧经验和等级计算规则 -
沈穆18191136081…… 问问等级与经验;1级0—119 2级120—399 3级400—899 4级900—1599 5级1600—2699 6级2700—4499 7级4500—6999 8级7000—10999 9级11000—17999 10级18000—27999 11级28000—41999 12级42000—63999 13级64000—93999 14级94000—139999
@蒲的5730:地平线4里怎么用无人机 -
沈穆18191136081…… 地平线4用无人机拍照方法如下: 准备材料:地平线4、无人机 1、打开地平线4.2、选择控制.3、先看一下拍照的快捷键,使用手柄的的是方向键上建,使用键盘是P键.4、进入游戏.5、使用手柄的上建可以看到进入拍照模式了.6、功能还挺多,各种角度什么的.7、按A 键就可以拍照了.8、拍照后可以保存到我的相册.
@蒲的5730:地平线4车房宝物位置 -
沈穆18191136081…… 1、minicoopers1965. 2、subaruimpreza22bSTI1998. 3、TRIUMPHSPITEFIRE1962. 4、FORDESCORTRSTURBO1986. 5、LANDROVERRANGEPOVER1973. 6、TVRCERBERASPEED121998.

导读:
12月27日,新一期地平线「你好,开发者」工具链技术专场在智猩猩顺利完结直播。专场由地平线编译器研发部负责人李建军主讲,主题为《地平线编译及编程实践》。
主要包含四个部分:
1、深度学习算法和应用的演进
李建军博士首先介绍了深度学习算法的演进,从ResNet、MobileNet、EfficientNet再到最新的Transformer,总体趋势是AI模型越来越复杂,模型结构也越来越复杂。软件开发方面,尤其在自动驾驶软件方案上,比如规划控制等,基于数据驱动的机器学习方案也在逐渐替代基于规则的方案。深度学习算法和应用的演进。
2、智能芯片架构的演进
“芯片架构的演进方式受算法和应用的牵引,是非常直观的。输入变了,肯定也会体现在芯片架构上。”
李建军博士介绍了征程历代芯片架构的迭代过程,强调了计算架构的复杂度提升会给编译器优化相应带来很大复杂性。
3、地平线编译优化实践
李建军博士介绍了地平线目前的第四代在研编译器架构HBDK4的结构和编译流程,重点讲解了为什么选MLIR并且对比了 MLIR和TVM。目前编译器优化现状为在编译性能和编译速度之间做权衡,针对现状李建军博士介绍了目前在探索的用RL(强化学习)的方法去提升编译效果和速度。
4、数据驱动的软硬件协同设计
最后,李建军博士分享了地平线在编译部分做的一些前沿技术探索——主要是数据驱动的软硬件协同设计。总体可描述为一个闭环:算法模型结构搜索、BPU架构搜索、RL编译优化,三者是互相依赖的过程,闭环中可以锁定任意两个来找另一个的最优解。
本文是此次专场主讲环节的实录整理。如果对直播回放以及Q&A有需求,可以点击阅读原文前去观看。
李建军:大家好,非常高兴能有机会和大家一起交流讨论。我是编译器研发部负责人李建军,今天主要是讲的是地平线在编译和编程方面的实践。
讲到编译器,大家首先会想到它输入是算法和应用,它的目标是使算法和应用在一个芯片架构上非常高效地运行。很多人认为编译器是一个架在算法应用和实际芯片中间的桥梁,编译器对于芯片能发挥的效率起到了非常关键的作用。
我会从背景出发,聊一下这些年深度学习算法应用的演进,还有智能芯片的架构,以及地平线为了应对这些变化在编译优化方面做的实践。最后讲一下我们在软件协同设计方面对前沿技术的探索。
01
深度学习算法和应用的演进
首先我们讲的是深度学习算法和应用的演进,这还是蛮有意思的一件事情,因为第一个网络我选的是ResNet。我大约是在2016年的时候来的地平线,这篇文章是2015年开始爆火,到现在谷歌的引用量已经19万多了,是非常夸张的引用量,影响力非常大。直到现在,各大芯片公司,比如NVIDIA,展示它的芯片有多高的算力的时候,基本上都会拿这个网络来看一下。
会选这个网络是因为它对AI芯片或GPU都非常友好,而且它的计算访问比特别高,计算非常规整,都是Convolution,只有一个Max pool,到比较靠后的地方才有一个Global avg-pool,中间是非常规整的Conv ReLU这种pattern。
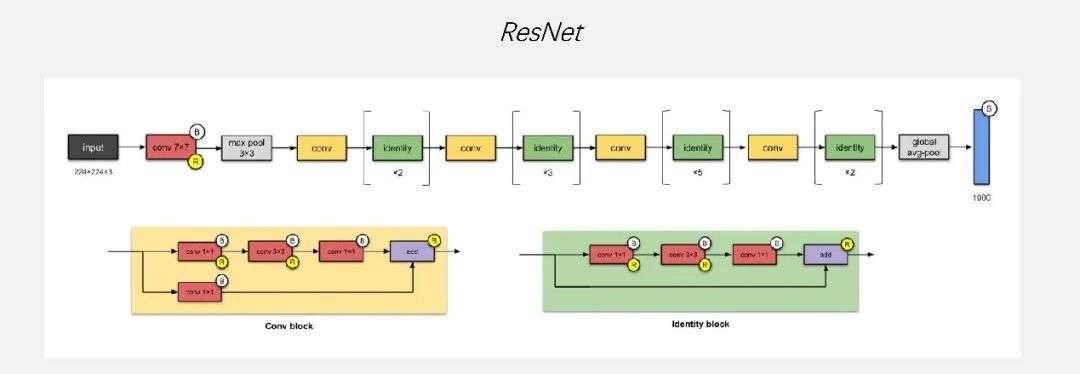
大约在2015、2016年的时候,有很多初创的芯片公司都在针对ResNet网络做优化。当时大家都会认为做AI芯片特别容易,如果是针对这个网络,确实特别容易,因为它对AI芯片的复杂度要求很低,且计算访问比也很好。
但是过了很短的一段时间大家发现,ResNet网络的计算密度太高了,当时在端侧很难找到一个非常大算力的芯片把网络跑得特别好。所以,有人提出了MobileNet,其实是在ResNet的基础上做了一些优化。
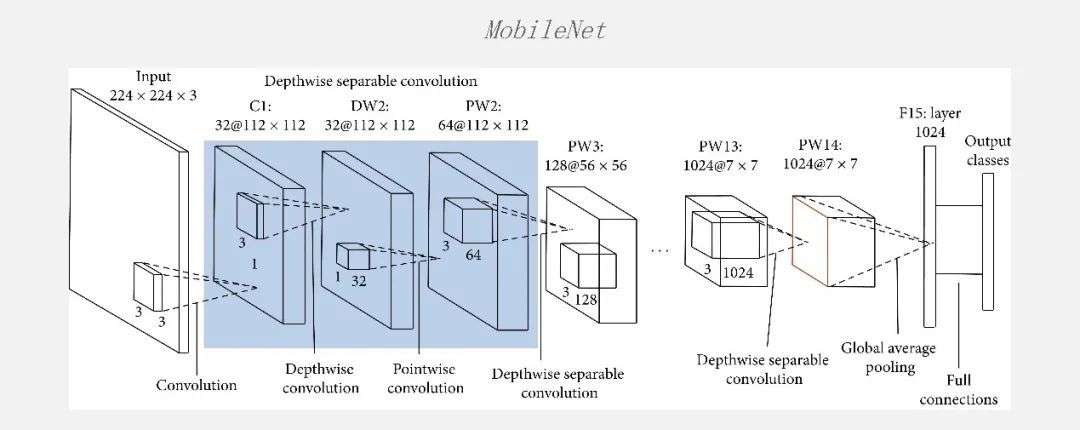
一个最基本的优化方法是提出了Depthwise Convolution,把普通的Conv拆成了Depthwise 和Pointwise,在CPU上达到了一个非常好的效果。当时那篇论文也是在CPU上,MobileNet比ResNet跑得速度快很多,但是精度基本上相当。当时大家都觉得很好,但在GPU上跑的时候大家又会发现:加速比其实没有那么高,而且在当时的一些专用的芯片上也去做了各种尝试,Depthwise Conv就会完全卡住。
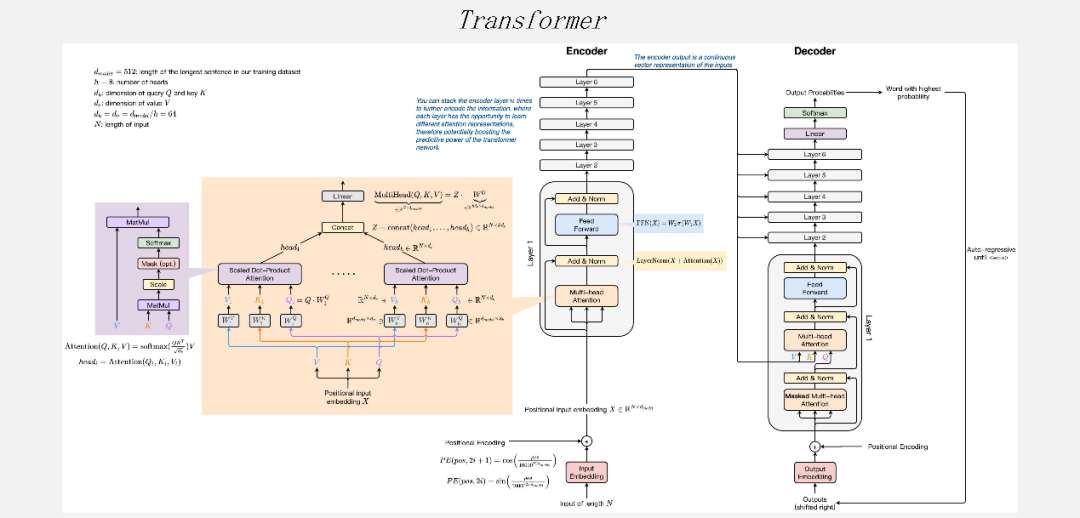
再接下来就是2017年的时候Attention被提出来。从那之后很多网络都朝着这个方面去发展,后来又提出了EfficientNet。
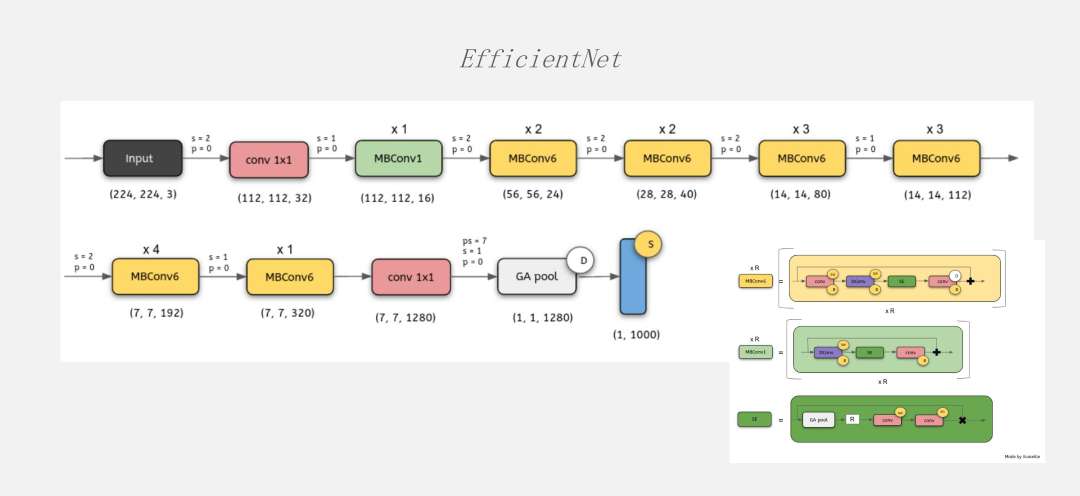
这个网络和ResNet、MobileNet框架上非常像,但内部又有很大的区别,在每个block内部的计算复杂度和算子的类型都发生了非常大的变化,在这个地方出现了很多Vector的计算。
而最近几年有Transformer一统天下的趋势。模型结构不管从算式的类型,还是从模型复杂度来说,都对AI芯片提出了非常大的挑战。
在这段时间大家发现,通过ResNet、MobileNet,GPU有一段时间比AI芯片差一些,但Transformer出来之后,GPU的竞争力又回来了很多。一个非常关键的因素是模型的复杂度,它对通用性的要求非常高。如果大家在做智能芯片时对通用性、应用性考虑的不是很好,那么它的效果在Transfomer类网络上会差很多。
整体来看深度学习算法的演进,我们会发现非常一些明显的趋势:
首先,AI模型是越来越复杂了。
从刚开始的Convolution包打天下,大家用Conv、Pooling再加几个特殊的算子,就能做一颗能效比非常好的AI芯片。到现在的Transformer,有Conv、矩阵乘、Reshape、LayerNorm、Softmax等各种复杂算子。
随着模型越来越大,GPT这种模型出来之后,Weight都是GB级别了。
模型结构也会变得越来越复杂。这里的复杂指的是在block内部,由原来的Convolution变成了一个非常复杂的图。
其次,随着模型越来越复杂,就需要一颗异构计算能力非常强的智能芯片。
什么是异构计算能力呢?就是每个部件之间都有高速的数据共享通路,而且有灵活的控制、调度并行。比如刚才提到的Transformer,它是Conv后面跟着一个Softmax、LayerNorm,再加上其他各种Vector类型的计算。如果一个Tensor Core和Vector Core中间隔得比较远,那么数据传输的时间可能会比计算时间长,现在有很多的芯片都卡在数据传输上。
再回来看Transformer模型,与其他模型相比它还有很多不同的特点。
一个最大的特点,是刚才讲到的它不止是Tensor计算。还有很多Vector计算,比如Softmax、LayerNorm、还有Elementwise操作;另外,它里面还有大量的Reshape、Transpose类似的操作。
另一个问题是计算访存比。这里面最突出的一个模型就是现在很火的GPT大语言模型,但不管对AI芯片还是对GPU都存在让人非常崩溃的计算访存比。因为如果是Server端,GPU可以通过batch的方式变得更好。但对端侧来说,跑类似的GPT模型时使用较大batch的概率不是很大。大家可以看一下各个公司发出来的数据,在一颗芯片上,尤其是端侧芯片,它的带宽的数据除以Weight的总量,和它能跑出来的FPS是差不多的,可能稍微差一点但不会差的很多。所以这个模型在所有的芯片上基本都是卡在Weight的访存上。
针对这种问题大家也尝试了大量的优化方式,比如GPGPU,将大量连续的计算融合成一个大的Kernel,这样能有效地减少带宽。最近几年的 FlashAttention就是通过手动的方式把很多算子融合成一个比较大的Kernel,在大的Kernel里面做Tiling能有效减少片外的访存。
而对NPU来说,它和GPGPU架构是有很多区别的。因为它会有一个比较大的片内SRAM,可以通过编译来控制。这里主要是一些异构计算,怎么利用SRAM这些片内的高速缓存来减少访存量呢?
不管是GPGPU还是NPU,大家都不可避免要去解决的一个问题是:Weight就是那么大,是GB级别,再大的SRAM也访存不住,最后还是会卡在Weight的访存。Server端是通过batch来解决,而NPU大家也在想各种办法更好地解决这个问题。
另外一个问题是Reshape/Transpose的引入。
因为Reshape/Transpose很多,可能会导致这个图变得很复杂,现在的模型对图优化的需求比以往要高很多,而且有时候花了很长时间会发现Reshape/Transpose有些地方是可以消除,但是它可能是一个特殊case,通过自动化的编译手段是很难完全消除。
基于以上讲的深度学习算法的演进,我们回到应用层面,讲讲智能驾驶软件开发。
这张图是当时应该是在HotChips 2017 Adapted from Jeff Dean展示的一张图片。
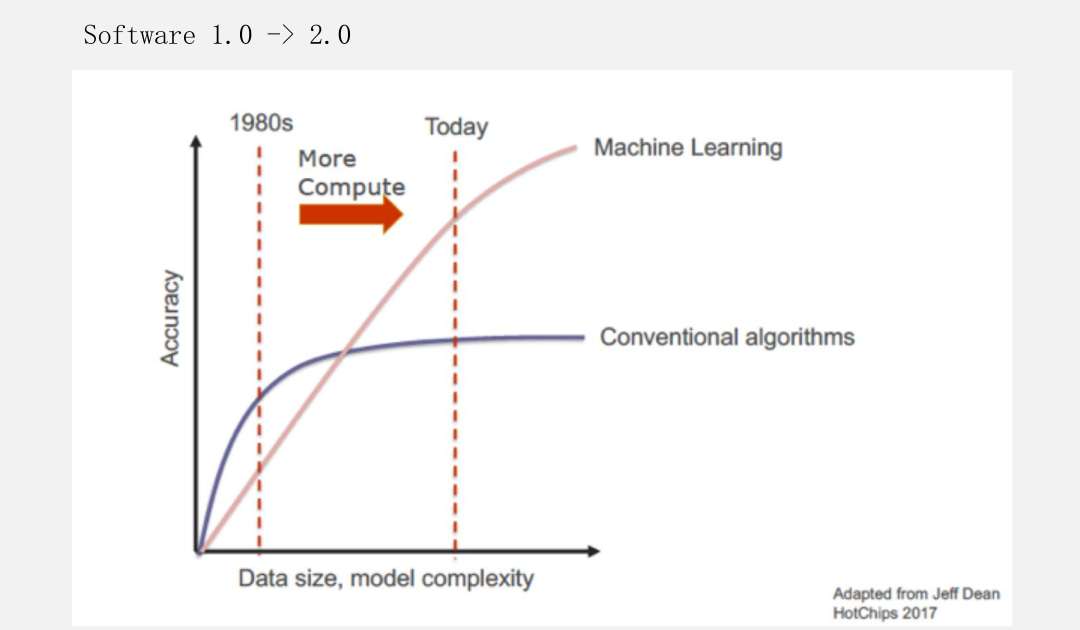
当时想表达的意思是:传统的方式基本上都是用算法来写各种应用的,而随着机器学习的不断发展,就变成了收集到大量数据之后,用机器学习的方法代替传统的算法。这里一家非常有代表性的是DeepMind公司,基本上每隔一段时间就会发一篇类似Science/Nature的文章,用大语言模型解决了哪些传统的问题。从刚开始的下棋,到解数学题,再到蛋白质分子等各种应用。证明了随着数据量的堆叠,机器学习可以解决很多原来需要通过范式的方式来解决的问题。
而对于智能驾驶软件开发来说,基本上都是朝着方向走的。这个例子是当时特斯拉AI Day展示的一张图片,主要是解决自动驾驶中的路径规划和控制问题。
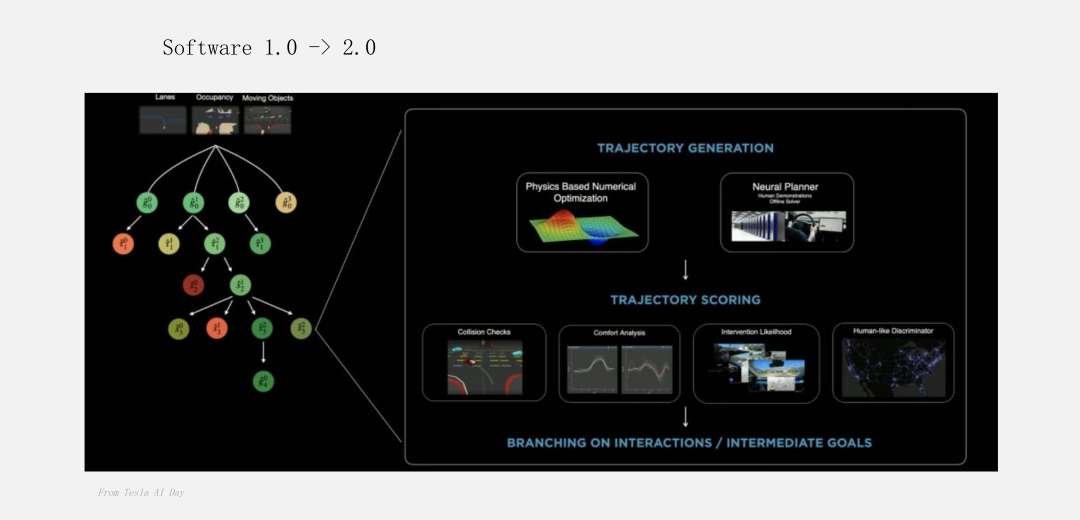
现在大家基本上也在高阶自动驾驶方向性上达成了共识:用一个神经网络去更好地预测应选哪一条路去做决策,反而比基于规则的方式更好。可能写了很多条规则,但解决不了一个普遍的问题。但如果让机器去学习,只要给它足够多的数据,就可以学出非常好的策略。这基本上是大家现在做很多复杂的软件开发所使用的一条技术路线。
软件开发是从基于规则的代码变成了数据驱动的神经网络,比如规划控制、模型的前后处理、模型的串联。但大家可以发现,这部分的算法并不是传统的静态网络,而是动静结合的,所以对异构计算的需求也变得比像Transformer这种网络更高一些。
它需要高效地执行整个应用的流程,模型是嵌在流程里的,也需要去做更多类似于模型间的LTO优化。比如一个Task同时在编译和运行时做联合优化,才能得到比较好的效果。
前面主要是讲的编译器输入,一个是算法,另一个是自动驾驶的应用。接下来我们看一下智能芯片架构是怎么演进的。
02
智能芯片架构的演进
芯片架构的演进方式受算法和应用的牵引,也是非常直观的。因为输入变了,肯定也会体现在芯片架构上。
这是地平线征程3这颗芯片的架构:

这个架构还是比较简单的,中间最大的地方是Tensor Core是MAC阵列,绿色的部分是SRAM,下面是Load Store的模块,还有一些专用的模块Pooling、ROI Align、后处理模块等。其中Pooling模块在前面几代的算法的演进过程中,是一个用的比较多的算子;还有一些专用的图像处理的IPU,Pyramid、图像的PreProcessing等。可以看到这个芯片架构是非常简单的,通过一个AXI的总线连接DDR,使DDR和SRAM之间做数据交互。这个简单的设计当时在ResNet、MobileNet、EfficientNet这些网络上达到了很好的效果。再加上编译器联合优化,DDR带宽也可以做的比较小,芯片的能效也会做得比较好。
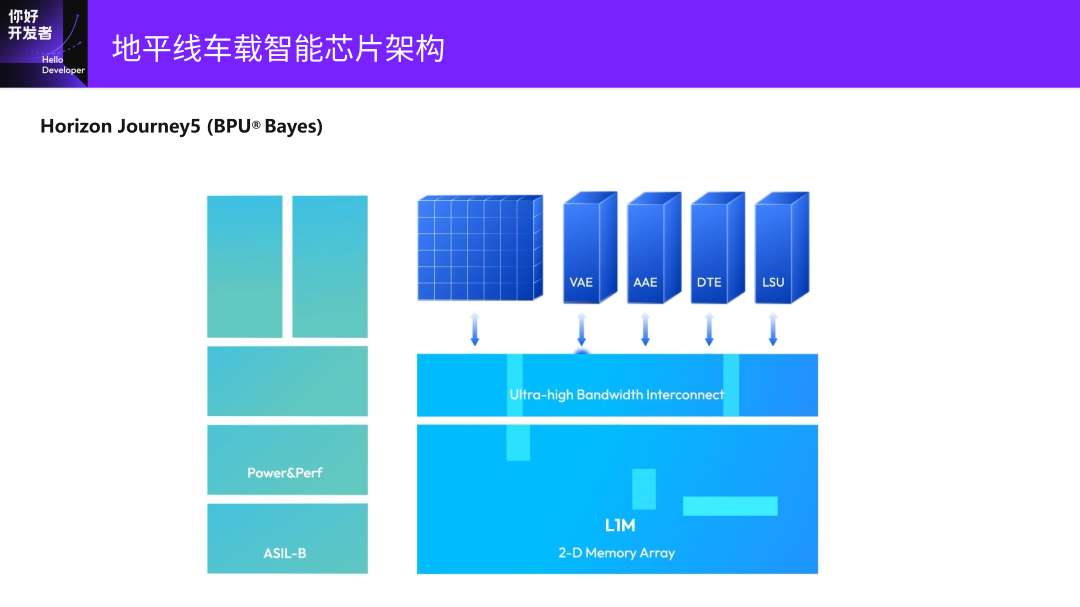
再接下来的演进就到了地平线的征程5(J5)。
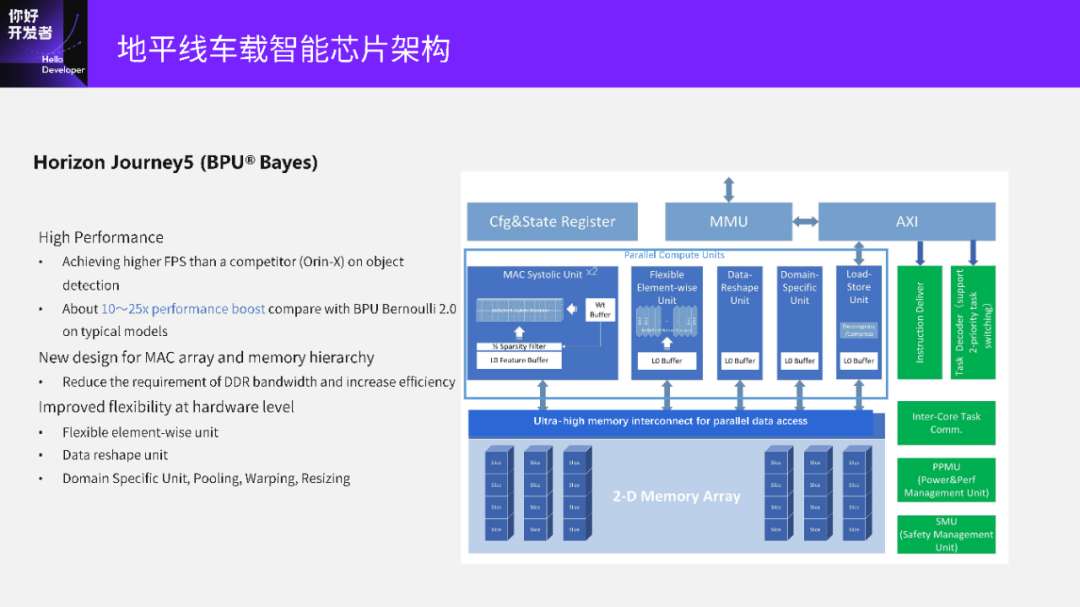
J5展现了很多算法演进以及应用软件变化的趋势。一个最大的变化是我们加了一个 Vector (Elementwise) 处理的部件,还加了一个Reshape的部件做 Data Layout&Reshape 硬件高效支持。DSU是我们的刚才说到的Pooling、PreProcessing这种模块,整个贝叶斯BPU架构的有效算力最高可以达到伯努利2.0的25倍。
下图中VAE是刚才提到的Vector部件,AAE相当于各种专用的加速核。整个数据流向算是比较清晰简单。除了Tensor Core之外,又另加了两个小的计算Vector核。
接下来是今年发布的BPU Nash智能计算架构,会用于征程6系列芯片。
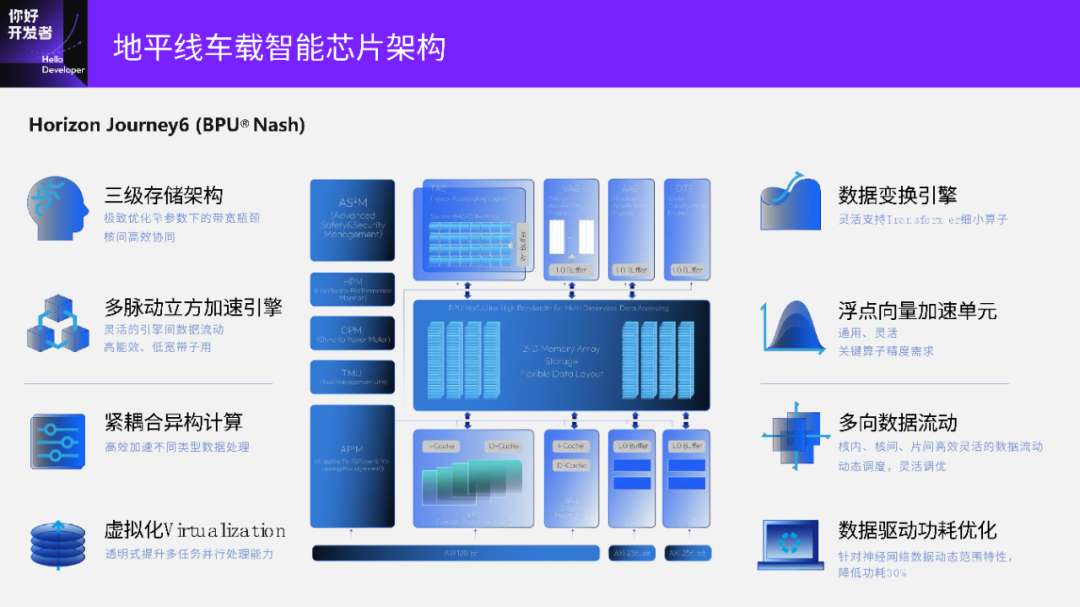
这里面就比较有特点的是TAE、VAE(Vector核)、AAE,是完全从J5架构延续下来的,中间有一个带宽更大的二维组织SRAM。新加了一个浮点的处理部件VPU,还有一颗标量的核SPU,来更细粒度地控制片内的数据交互和计算调度,而且它是三级存储,在下一张图会展示。
在片上会有一个L2的SRAM,它的计算和J5是类似的,是一个紧耦合异构。所有的计算部件包括标量的核,都可以非常高效地访问片上的SRAM,并有专门的数据变换引擎,就是PPT上的DTE的部分,可以灵活地支持Transformer中各种各样的细小的Reshape/Transpose算子。浮点计算加速单元是刚才提到的VPU。
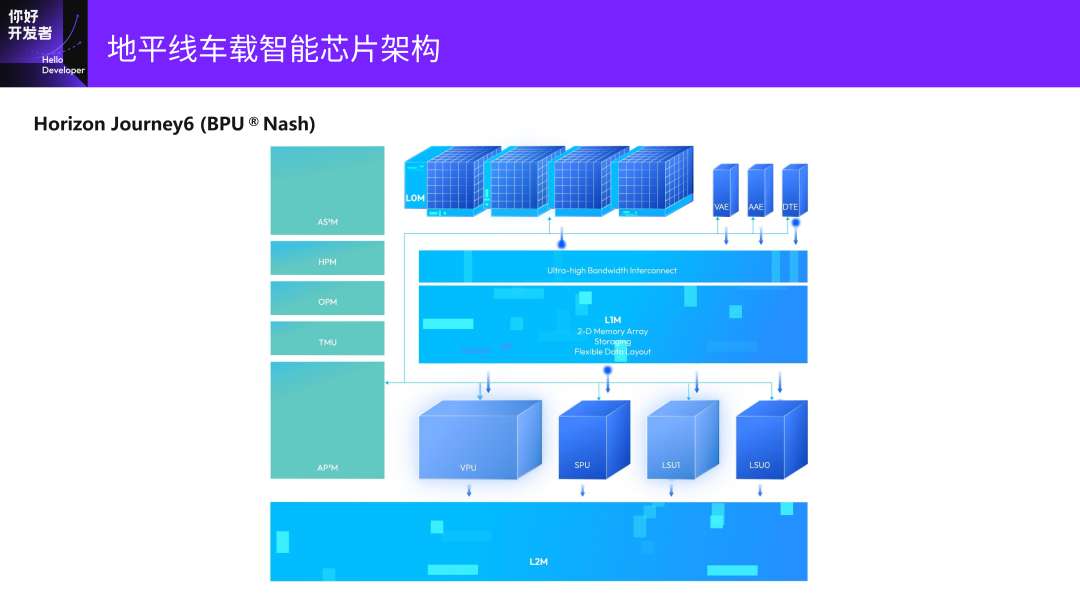
可以看到,我们在SoC上还加了一个非常大的L2的SRAM,假设SoC上有BPU核、ARM核、DSP,那就可以和它们做高速数据交互。可以看到数据交互在VPU、SPU、Scalar模块,相对于原来已经变得复杂很多。它的计算架构是变得越来越复杂,是为了更好地适应算法和应用的变化。
这样也带来了很大的好处:能够将绝大部分的模型计算在一个芯片内去完成,不需要去跟外面的ARM核去做交互;另外有一个高速共享的通路做异构调度协作。
Tensor Core有Convolution、矩阵乘等一些其他的算子。Vector Core主要是处理Elementwise,Attention结构。Scalar Core是一些控制逻辑,去做更好地调度和细粒度控制。还有一些特定的计算部件,比如特定高频激活函数的硬件加速。
但这里就会存在一个非常大的问题:整个计算架构的复杂度会给编译器优化带来很大的复杂度。如果想把它优化好,提出的挑战与原来在J2、J3上优化方式相比是一个数量级的变化。
接下来就重点讲讲地平线的编译优化实践。
03
地平线编译优化实践
重点介绍下地平线内部在研的领先编译器架构HBDK4。
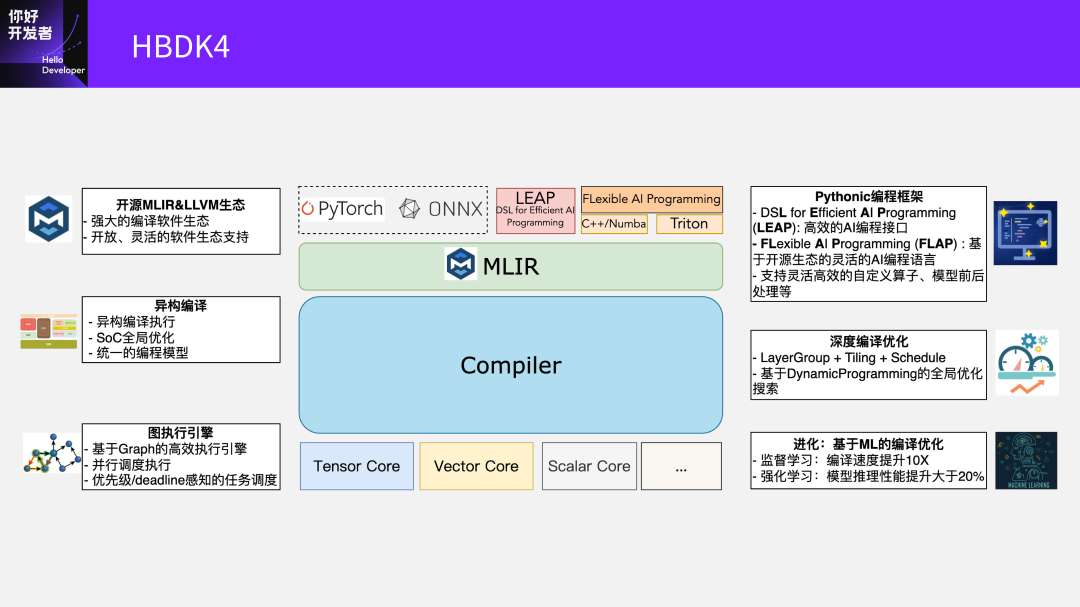
首先,这个新的架构是基于MLIR来设计编译器的流程,支持异构编译,能更好地把各种计算高效利用起来。
另外,中间有个非常高效的图执行的引擎。因为编译之后想要在芯片上高效地跑起来,就需要一个非常高效的Runtime去支撑。所以我们设计了一个基于Graph的高效执行引擎,支持各种任务调度和挑战。
大家在这里也问了一些问题,比如接下来我们的编程接口怎么样?在这一层我们会提供两层编程接口:第一个是LEAP,是一层DSL;另外一个是FLAP,是一个编程语言。通过这两层去支持灵活的自定义算子,还有模型的前后处理等各种功能。
还有一个是深度编译优化,我们现在做的编译优化从J3、J5到J6,一直是延续的。但现在也遇到了非常大的挑战,但也有了新的尝试。
接下来也会跟大家简单介绍编译优化策略的进化,是一些前沿探索。
这是我们架构的整体流程:
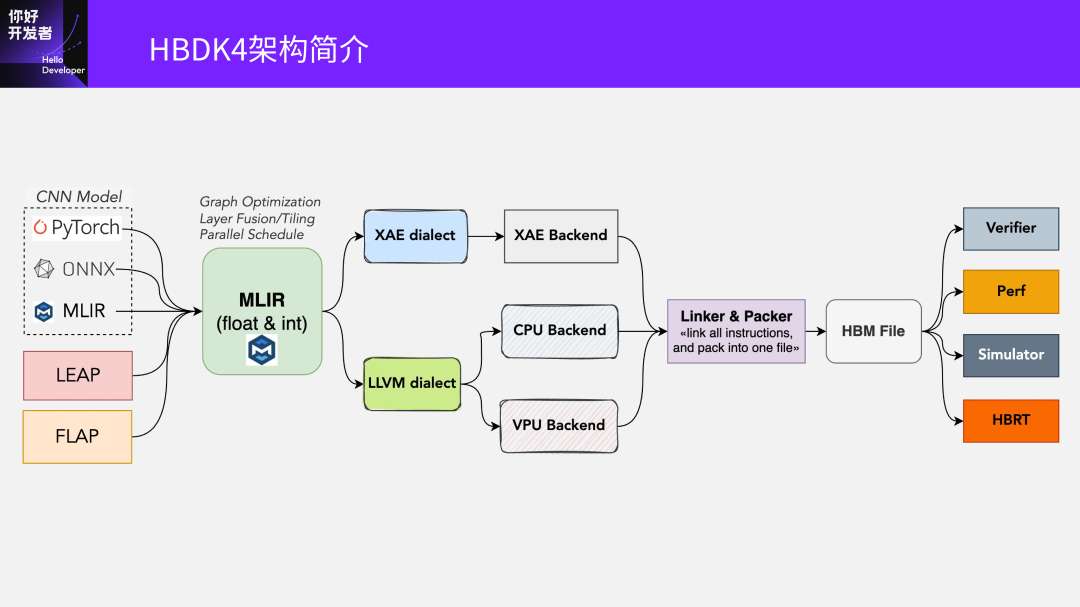
大家可以看到,我们的输入和上一页讲的类似,现在主要支持的配套框架是PyTorch、ONNX。像TensorFlow,还有更古老的Caffe,都是通过转到ONNX再进到编译器里的。另外两个输入是两个编程接口。
进来之后都会转到MLIR这一层。我们基于MLIR的基础设施构建了一个混合精度的MLIR(fioat & int)。在中间这一层中端上,我们会做大量的图优化、Layer Fusion、Tiling,还有各种调度。
在中端的优化之后,到了后端就会是分成XAE dialect和LLVM dialect。
XAE是各种硬件专用的加速核,比如Tensor Core,还有刚才说的VAE这类核。我们会把在CPU和浮点的VPU上要跑的东西落到LLVM的大类。再到CPU的后端编译完成之后,通过Linker和Packer生成一个HBM文件。这个HBM文件就是真正可以在板上可执行的文件。
编译完成之后,我们还提供了一些工具:
比如Verifier是验证编译出来程序的正确性,和原始的框架类的跑出结果是不是类似?因为中间还有一些量化问题,所以会做精度比较。
还有Perf,可以不用上板就给出大概的预估。但其实这里面有个问题:在J3这一代我们还是可以估得非常准的,唯一的变量就是DDR带宽。但到了J6这一代,随着芯片的复杂度越来越高,它的准确度会不断下降,但还是可以给大家一个差距不大的精度预估。
再一个就是模拟器。
最后是HBRT,是刚才我们说的芯片上的执行引擎。
讲到这地方,我估计大家会问为什么选MLIR?在前期收集到的问题中,也有这个问题。
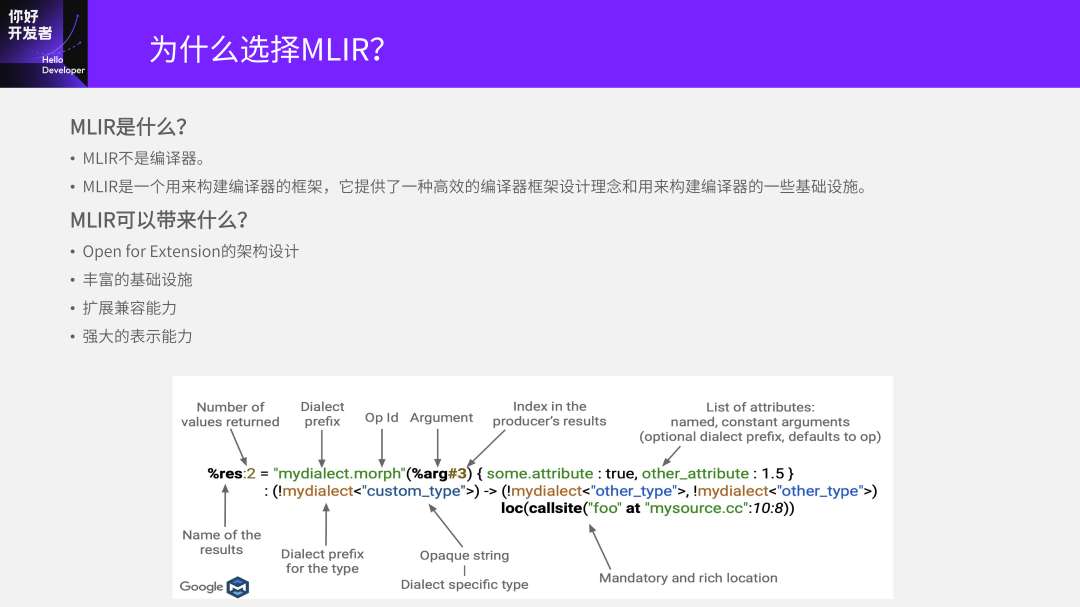
先简单说一下什么是MLIR?它不是一个编译器,是用来构建编译器的框架。它提供了一种高效的框架设计理念,还有用来构建编译器的一些基础设施。
MLIR可以带来什么?它的架构设计是非常容易扩展的,可以把AI芯片上的很多特性都通过扩展加入到MLIR表述中。它的基础设施做的也越来越完善了,兼容能力非常好,而且整个表示能力也非常强。
那为什么不选TVM?这个我觉得是对不同的公司的不同阶段,要根据需求去做取舍的问题,没有任何东西是完美的。
我们可以简单比较一下MLIR和TVM各自的特点。

MLIR是一个构建编译器的框架,不是一个编译器。而TVM是一个支持AI模型编译部署的端到端工具。端到端就是从一个浮点网络进去,可以帮你做量化、做编译,再直接到板上执行。还有TVM的Runtime到板上推理。
两者本质上并不是同一类框架,但是大家为什么一直拿它们做比较?因为在AI的大环境下,它们关注的是同一个领域,都是AI模型编译部署。
如果说,面向一个非CPU/GPU的硬件,TVM可以复用的是整个框架、前端和少量的编译passes。如果整个AI芯片的设计和GPU这类非常像,就可以用的更多。如果整个芯片的架构和GPU差距比较大,那后面很多part能直接用起来的概率不会很大。
这里面就面临一个问题:如果我们的芯片和CPU/GPU差别非常大,它的后端部分是没法复用的。而在编译器的开发中,工作量最大的就是编译器后端优化部分。
另外,从编译的框架设计来看,MLIR的设计理念是非常适合专用处理器的,而且提供了足够灵活的扩展性。MLIR现在还处于快速成长期,后面应该会有更多可以复用的基础设施,这也是我们选择MLIR的一个原因。
整个架构定了之后,刚才讲到一个编译器最大的工作就是怎么去做编译优化。
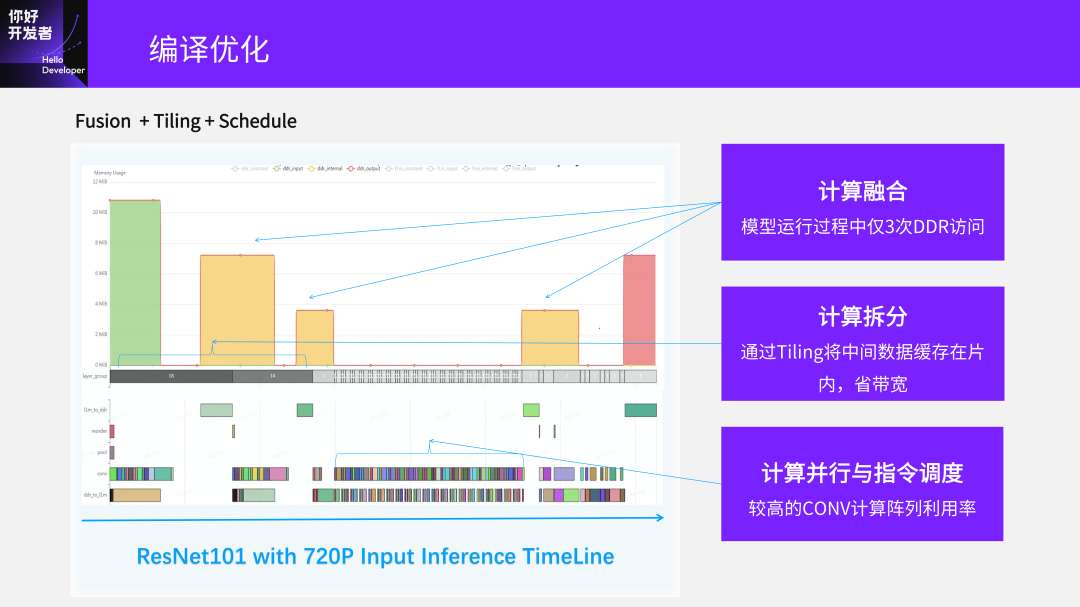
其实编译优化无非就是三步:先做融合,再去拆分,最后做并行和调度。我们会把很多不同层融合在一起,通过Tiling拆分之后,目标是将整个计算、访存完全Pipeline掩盖起来,达到非常高的Conv计算阵列利用率。
在这个过程中,地平线的做法有一些特色。
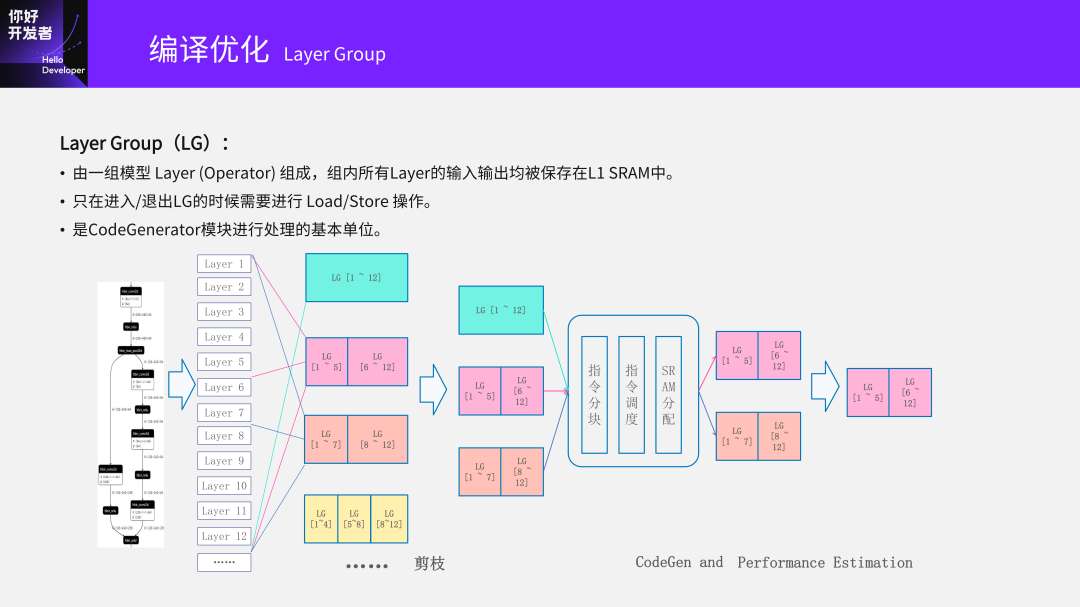
我们有一个叫Layer Group的概念。这个概念在学术界也会提到。所谓的Layer Group就是由一组模型 Layer (Operator) 组成。拿下面这个前12层这个例子来看,我可以把这些层分组,比如一个Layer Group的选择是1~12层分成一组;另外一个选择是1~5层一组,6~12一组,以此类推。
划成Layer Group之后怎么去做优化?我们默认只有进入和退出组的时候,才需要和外部的DDR做Load/Store操作去交互。把输入给Load进来,把结果Store出去。划好了组之后,后面所有的编译、Tiling、调度,都是以Layer Group为单位去操作的。
我们看下面这个例子,举了一个大约12层的例子,划组的时候就会有很多不同的选择:1~12是一组;1~5、6~12;1~7、8~12,还可以1~4、5~8、9~12后面还有省略号,这是一个排列组合问题,有很多种不同的划法。最极端的划法一个是1~12一组;另一个是1~12划成12组,每一层是一组。最原始在GPU上的做法就是每一层是一组,因为每一层算完之后到GDDR中汇在一起,再去做下一层。划完之后我们再接下来会做相当于剪枝操作,剪枝操作就是将已知的、效果不太好的剪掉。
再接下来就是以Layer Group为单位去做指令的分块(Tiling)、调度(Schedule)、SRAM分配。如果它可以正常走完这些流程,证明它是可编译的,因为在这地方有时划了组之后会编译不出来,因为中间需要缓存的Weight太大了,如果编译不了就没有意义。
通过CodeGen和Cost Model去预估生成的指令序列性能,最终选出一个计算时间最短的组合,比如选出来是1~5和6~12是最好的,优化的空间是非常大的,如果是12层就有很多不同选择。
对于n层的模型去划Layer Group就需要尝试2^(n-1) 次,还可以做剪枝操作。
每个Layer Group在CodeGen过程中,需要尝试不同的代码生成策略,比如Tiling方向、Tiling次数,还有要不要继续把中间输出的结果缓存在SRAM。
为了解决这些问题,我们现在用的一个方法是动态规划算法,用动态规划算法去搜索一个最优的Layer Group划分。但为了防止直接爆炸掉,我们会限制最大的Layer数量,比如最多搜索到50层(50层是一组是我们能承受的极限)。比如包含100层Layer模型,如果完全搜索是2^99(~6.3 e+29)次尝试。但如果用DP方法,就会把数量级降了,大约是5000次。如果再限定每个Layer Group中算子的最大数量,需要进行的尝试会更少,但没有包含Tiling、Schedule这些开销,还有Perf的预估。
我们还会去做很多启发式的剪枝优化,优化掉明显不会有收益的分支。
当我划了Layer Group之后,假设现在就是Conv2D+Pool2D+Store三个为一组,我们怎么去做Tiling,会有什么好处?很多同学都在各种论文中看到过了,基本上就是划出了更多的Tile,比如PPT中是划成了三块,释放出了很多的并行性。
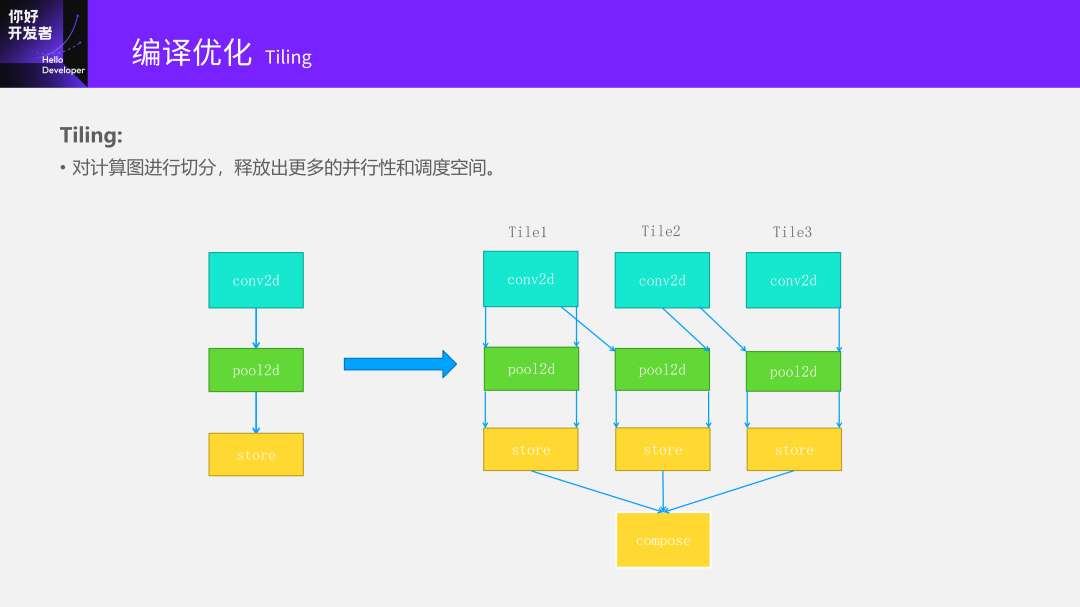
比如Tile1到最后这一段就和下一个Tile2有依赖关系。为什么会有依赖呢?因为整个Convolution的Input和Output是一个倒金字塔,有交叠问题,中间的input有交叠才能算出来两个连续的output数据。当Tile2算到一定程度之后就可以做后面的操作,而且Pooling和Store的问题就会小很多,是一个直接依赖的过程。所以它就释放出了更多并行性和调度空间。
还有一个问题是Tiling的维度。
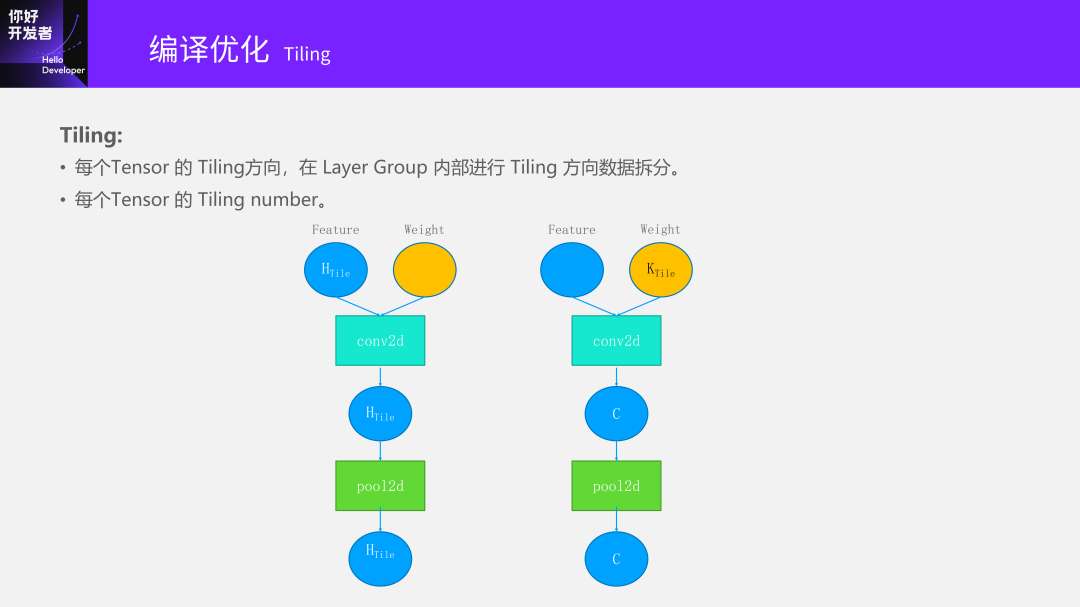
做Tiling有很多种不同的选择。只在横的方向去做Tiling,还是在竖的方向做Tiling,或者横竖都做把它分成一个块状。
另外一种选择是Tiling Weight,之后就是输出的Channel方向去做Tiling。首先的一个问题是到底在哪个维度上做Tiling?还是在很多维度上同时Tiling?假设我选择了在H方向做Tiling,到底多少块呢?到底是哪一个是最优的?
最近几年的很多论文都是要解决这个问题。比如选一个Conv,怎么知道哪个Tiling次数是最好的?从刚开始的AutoTVM,通过一些方法去搜;还有最近几年的Answer之类的论文,都是能很快速的找到最优解。在地平线的编译器中,我们也同样会遇到这个问题。
Tiling完之后,就是怎么去做调度了。

所谓的调度就是对指令序列进行重排,充分利用硬件资源提升编译性能。
同时,在调度过程中考虑SRAM资源占用情况。假设Conv2D调到这个地方之后,Input、Output需求SRAM装不下了,那没有办法只能往后等一下再执行,这是很有可能发生的。
在调度的时候要考虑还需要SRAM分配。
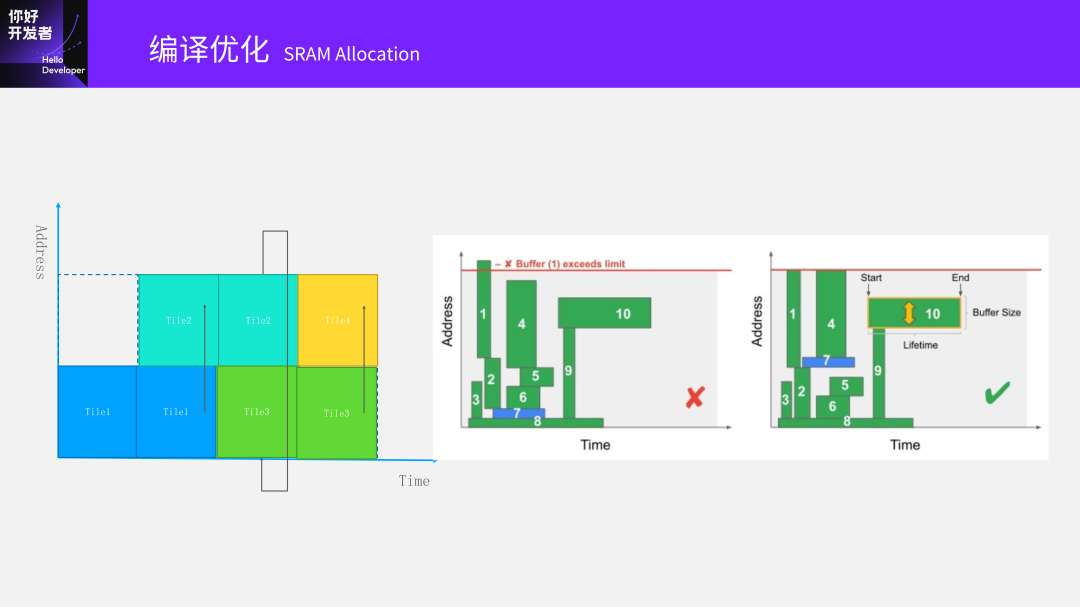
刚开始我们去做这个事情的时候,大家觉得SRAM分配应该非常容易的。如果按照等分的方式做Tiling,每一个Tile的大小是一样的。但模型变得越来越复杂之后会发现变成右边这种情况,有各种各样的大小和形状。分得不好会导致有时候能放下,有时候又放不下。因此SRAM分配算法的复杂度也提升了很多。
刚才讲的是编译优化。传统的,以及现在地平线用的,和学术上或很多公司的其实没有本质上的区别,都是基于规则的优化搜索问题。
但这里面带来的一个问题是:模型和芯片的复杂度直接影响了编译的时间。
当模型输入变大之后,去做Fusion & Tiling & Schedule的选择空间就会变大很多。模型结构复杂了,那么中间的数据对齐、调度优化也会复杂很多。而且芯片异构的复杂度、选择哪一个算子、在哪个计算核上跑,都也会带来调度空间的问题。
解决调度空间中模型性能和编译时间的问题,就像跷跷板的两端。有时候为了得到更好的模型性能,就需要更长一点的编译时间。如果有更好的算法,也可以做得更好,但这个关系基本不会发生变化。很多时候为了满足不同的需求,我们也提供了不同的优化级别,比如说O2、O3,还有Ofast。
总的来说就是在探索空间(编译性能)和编译速度之间去做权衡。
但在实际过程中会发现一个有意思的问题——编译时间长。有时候一个模型大了之后,编译时间快到一小时这个级别了,时间特别长影响开发效率。有一个解决办法是:其实有一个O2的选项,也可以达到和O3差不多的性能,但速度会快很多。但在实际使用中丝毫性能损失都不能被接受,因为到最后要上板量产的时候,需要达到极致的性能,哪怕损失5%也接受不了。
因此,还是需要想一个鱼和熊掌兼得的方式。接下来讲一讲我们在这方面做的探索与尝试。
现在智能驾驶从规则实现到了数据驱动,也得到了一些很好的效果。比如DeepMind也做了很多的尝试,从刚开始的AlphaGo是用人类的经验去训模型,得到了非常好的效果打败了人类。但后来进化到只需要告诉它的规则,通过强化学习的方式自己和自己训练,就可以得到一个比原来更好的效果,可以泛化到很多不同领域上。再到20年底的MuZero,现在又出了很多个不同升级的版本。基本上连规则都不需要告诉,只需要给一个判断,它连规则都可以学习出来。
这也给了我们很多启发:编译过程就是不断决策的一个过程。比如在哪个方面做Tiling本来就是一个决策、Tiling多少份也是决策、SRAM中放在什么地方也是一个决策,最后就变成一个离散的决策优化问题。不同的决策方式、决策序列都会影响到最终优化的效果。我们首先做了一个尝试,用的传统的DP方法和探索的方法收集到了很多的数据,作为一个数据池,设计了很多模型,包括图神经网络、蒙特卡洛搜索、强化学习的方法等来看到底能带来什么样的产出。
这是我们为了解决编译时间长的问题最先做的工作,和学术界大家做的很多东西也比较像,但解决问题的思路稍微有一点区别。
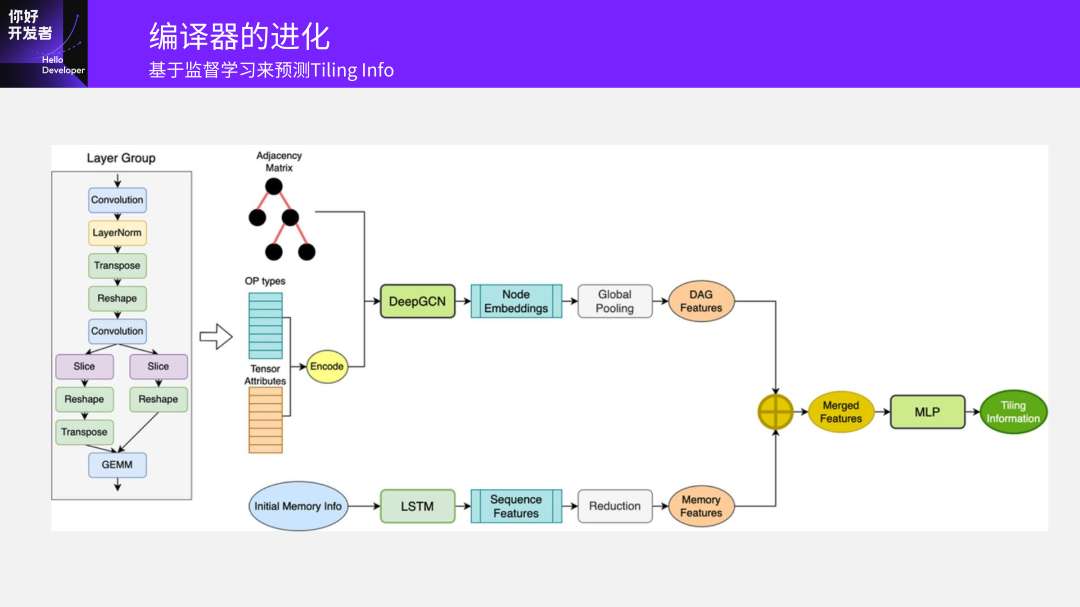
输入一个模型之后,它就是一个图,通过原始的方法就知道对于这个模型结构图,大概是什么样的分组策略,什么Tiling策略是最优的。我们先解决一个子问题,假设已经分好组了,另一个探索空间就是知道Tiling的方向和数量。我们拿已经收集到的很多数据去训练GCN网络,最后输出预测出这个子图Layer Group Tiling的维度和数量多少是最好的,基于原来的DP、搜索方法得出结果,应该不会超过已有方法的上限,因为输入数据就是这样的。
这是我们得到的一个结果:
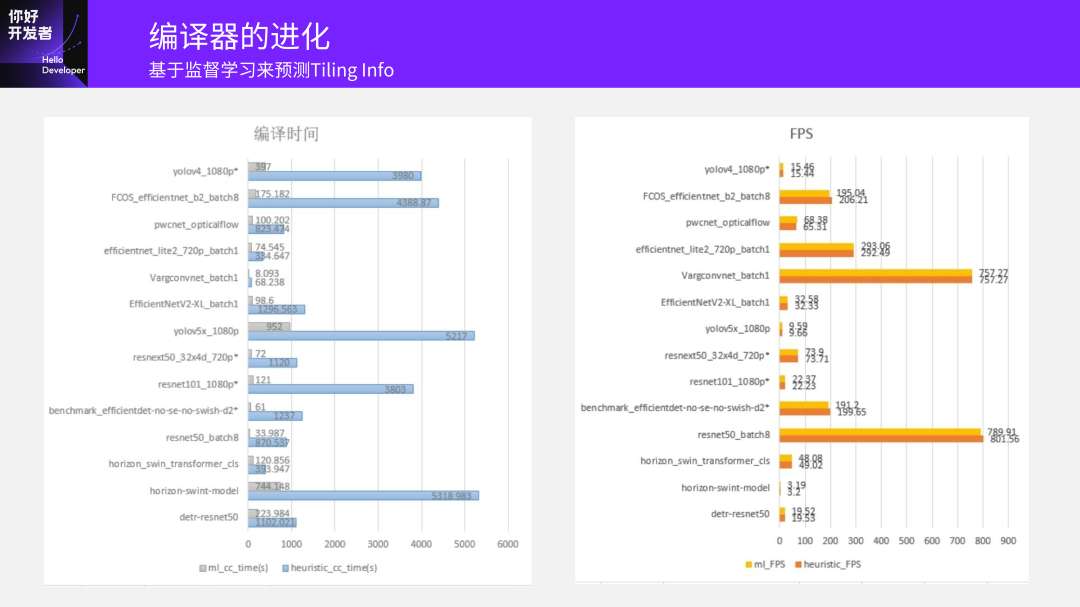
可以看到当你训练出一个网络之后,原来是通过搜索拿到一个预估的数据,耗时较多;如果用网络去推理,那么时间应该会显著降低。这里比较的是:我们用模型推理得到结果的时间,和原始编译探索过程中需要的时间。平均起来编译时间大约是原来的1/20,能达到这么高的加速。
另外一个问题是模型的精度到底怎么样?对FPS的编译性能有多大影响?
右边这个图是它的FPS,大家可以看到影响其实非常小,基本上在±1%或2%的模型性能的影响前提下,模型编译速度可以提升20倍。我们在现在发版的FP3里已经把这部分加进去了,加了一个“-om”的选项,用神经网络的方式去加速。大家如果在使用地平线的工具链也可以尝试一下,效果还不错。
但在前面我们去做基于搜索的方式比如DP的搜索,已经做了大量的剪枝。剪枝是为了能在较短的时间内(比如一个小时之内),拿到模型编译的结果,同时也丢失掉了很多优化的空间,优化的机会也就丧失掉了。
我们受到了AlphaZero的一些启发,能不能基于强化学习的方式自己去学。如果让自己去学就是把它变成一系列动作,其实也不是很麻烦。
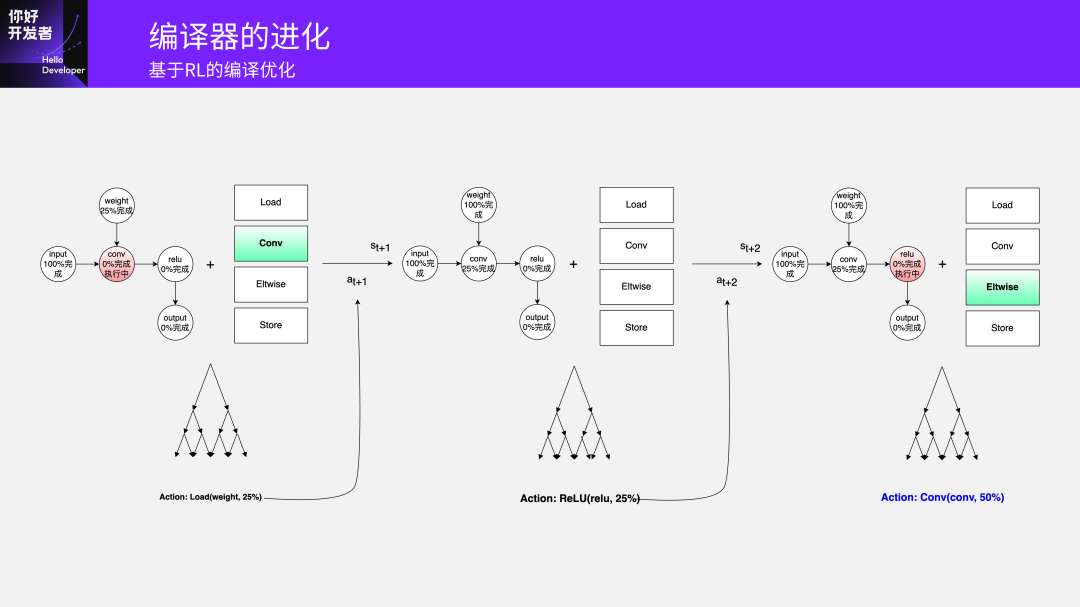
你有一个Input,假设第一层是Conv,刚开始唯一能选择的空间是Load一个Weight。当Input Load完成之后,Conv在每一步都要做一个决策,是算一部分输入?把输出store出去,把输入Load进来?还是执行其他可以选择的计算?这是每一步的Action Space可选择的计算空间,然后它自己去学。最终的一个评判标准是当结束最后一个操作的时候,所有的数据都已经处理完了。这是我们设计的一个模型。
当然,这一块我们现在还正在探索。我们也和围棋之类的做过比较,整个编译器的操作空间Action Space是比围棋的空间要大很多的。所以我们在做的过程中也在一步步把复杂度加上去。现在展示这个结果已经是把复杂度加得和真实环境非常像了,在各种SRAM的限制、Tiling的复杂度可能没有加得那么全,但已经能说明一些问题了。
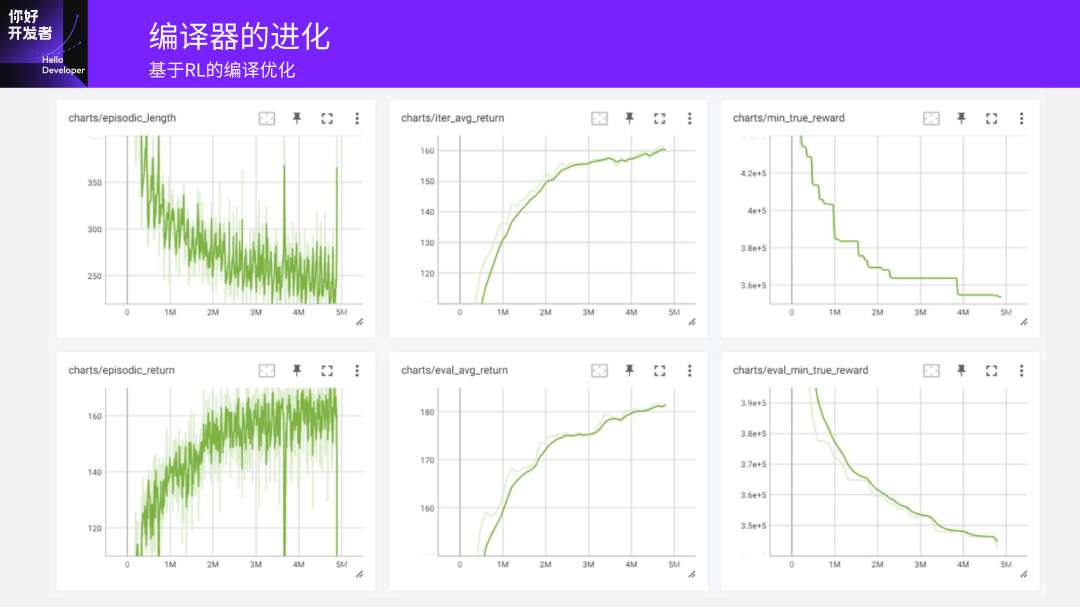
第一个图是随着训练的部署,在每一个迭代里面探索到它要做多少步才能把整个的模型都做完。
第二个图是它每个iter-avg-return,收敛速度还是蛮好的。
最后一个图是它最终训练完了之后,通过更多的尝试就可以得到非常好的性能。纵坐标是它完成整个模型需要的cycles。随着上升的指令序列走的越来越多,它已经学到了怎么做可以去达到非常好的收敛效果。
现在我们基于ResNet去做这种尝试,已经拿到了与DP的方法非常接近的效果,甚至在某些情况下,已经超出了人为设定的各种规则的指令序列。当然,我们现在还是在简单场景下尝试的,到后面还需要提升场景复杂度。不过从现在的预案探索的结果来看,我们还是有信心能达到比较好的效果。
04
编程模型
下一部分是编程模型,也是我们在这一阶段着重要去做的。
地平线在J3、J5编程接口这一方面,一直在探索更好的方式来实现更灵活地调用硬件。
在CPU/GPU上,大家用的最多是C++和CUDA,这两个生态也是非常强的。在机器学习的编程生态里,我们认为支持C++和CUDA都会有各种困难,NVIDIA支持CUDA这么多年也遇到了很多困难,证明这条路不那么好走,而且我们的芯片其实和GPGPU之类的架构上还是有比较大的差别。PyTorch 2.x系列用了Triton方式来写后端;之前还有人尝试用Numba;最近学术界也有很多新的编程模型出来,有人提出了Hidet,还有各种各样的编程方式。
我们现在正在去做的这两个编程的接口,一个是LEAP,另一个是FLAP。
1、LEAP
它就是一个DSL。DSL可以使用TensorCore、VPU、DSP(如果SoC有DSP),我们已经实现好各种指令,或比指令粒度稍大一点的功能、一些kernel,封装成一个API,让用户直接去调。用户可以基于基本的DSL进行模型串联、前后处理,因为它会非常灵活地支持一些Vector操作。
另外,我们在这一层还提供了一个C++自定义算子在框架层面的封装,统一的注册接口。这样就不需要自己再去调C++了,可以把C++直接注册到这一层接口上,模型就可以直接用。后面会有个例子给大家看一下。
2、FLAP
另一个就是FLAP。FLAP我们现在想做的是Python的编程接口,算法同学在这方面是需求的主力。后面随着需求不断增加,我们有可能支持C-like,但现在还没有提上日程。
我们现在是想做的是兼容Triton、Numba等Pythonic编程语言,已经做了初步的支持。用户可以实现灵活的自定义算子,与框架统一的Python编程界面。
看一下这个例子:
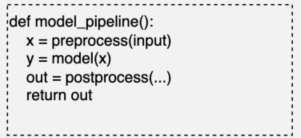
假设我们现在有一个非常简单的模型。它有Input,也有前处理,原来的前处理很多时候是用C++写的,有一些图像格式的变换等各种东西;中间是一个神经网络;之后是后处理,Output parsing解析、Layout conversion。
对于这个网络如果想去做部署,大概可以写成最右边这幅图。
我们先看前处理:假设在前处理在Python环境中可以直接使用import torch,大家对aten算子非常熟悉的,尤其是做算法的同学。可以直接用aten算子加上LEAP中提供的API或算子(它就是算子级别),直接去拼出来你想要的应用。
如果大家有自定义的一些应用,但这些在标准化算子中没有也没问题,因为你一般会用C++实现。我们提供了一个custom_op的接口,可以把你的C++算子注册进来,通过这种方式直接调用。
下面的示例是用Triton来写的,类似于后处理的过程。
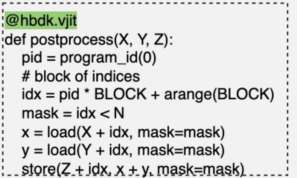
如果大家对CUDA、Triton都有了解的话,就知道它是一个和CUDA比较像的并行化的东西。但它把CUDA很多比较复杂的一些东西比如memory层次等都隐藏掉了,对用户的编程门槛要低很多。很多人说它的效率在GPU上的极致情况下比CUDA会差一些,因为它是VPU,和GPU的环境不太一样,但初步来看性能还不错。
当用Triton写了之后,中间网络还不变。
你可以定义一个Pipeline,这也是用Python写的,preprocess中间调model,之后postprocess,最后return out。
这些整个都是Python环境,再加上C++已经提前把它编译成变成SO了,只需要调用它就好了。
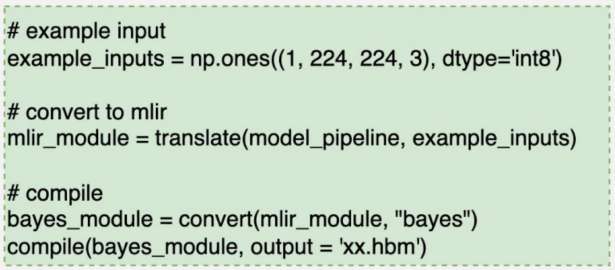
我们HBDK4里提供了很多Python的API接口,可以准备一个输入用HBDK中的translate接口直接转成MLIR,然后去做编译,接着convert到执行的后端去做编译,就生成了一个HBM(Horizon BPU Model,HBDK编译器生成的模型文件)。
我们提供了很多接口的方式去构建前后处理。我们推荐优先用Torch Ops,因为大家对这块最熟悉。如果Torch Ops没有的话,可以LEAP(DSL)。若这两种都没有达到你的需求,可以用Triton自定义算子。你认为Triton写起来很复杂,那也可以用C++。
等到芯片发布之后,也欢迎大家去做尝试,给我们更多反馈。因为我们也在快速的迭代中。
05
前沿技术探索
最后讲一下地平线在编译这部分做的一些前沿技术探索,主要是数据驱动的软硬件协同设计。
地平线的硬件编译器和芯片走得非常近,是非常典型的“软硬协同”的工作模式。在芯片的架构中,我们会参与的非常早。在讨论芯片架构的过程中我们编译器团队就会参与进去,和芯片团队一起讨论指令级别的架构是什么样;构建接下来的性能评估的工具,去评估在新的架构下,什么样的模型能跑出怎样的性能。我们也会在不断迭代的过程中给芯片团队很多反馈,比如需要芯片实现某个功能,使整个编译器更加高效,芯片团队也会跟我们一起讨论是不是有其他的方式。
编译器和BPU耦合得非常紧,在芯片架构做的过程中和芯片回来之后,还有一个问题就是算法。一些比较前沿的需求也会同时导入进来,等芯片架构定了之后也会反过来影响算法。
这就是前面讲的,我们现在正在做的一些基于ML的编译优化的探索。

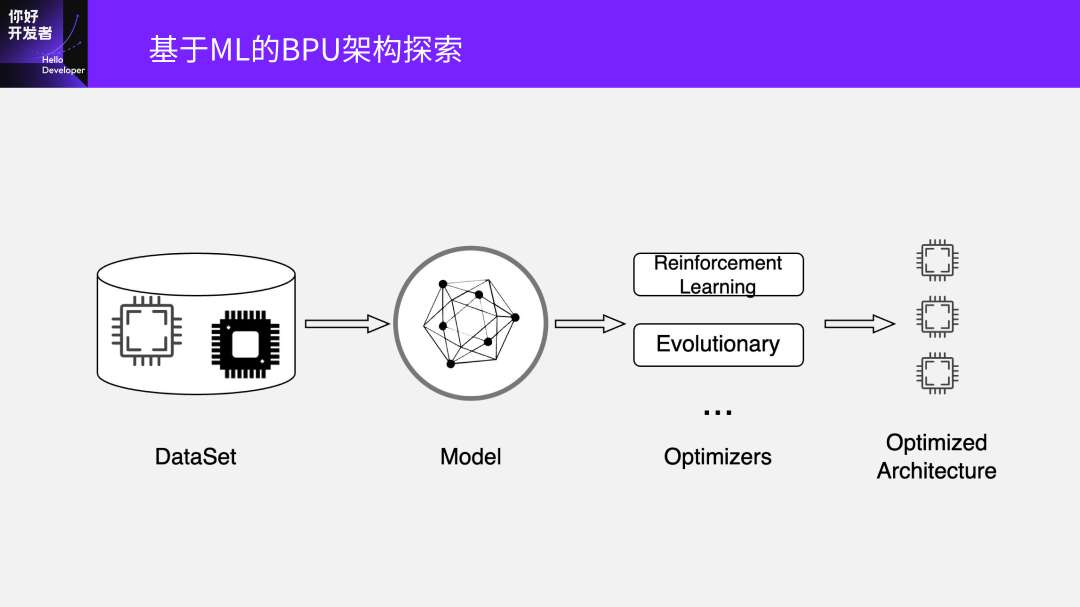
另外,刚才讲的是BPU架构。BPU还是有很大的探索空间,比如刚才讲的SRAM要设多大、Vector算力要做多少、Tensor的配比是多少、中间的带宽需要多高等各种不同的选择。到最后也变成了选择决策的问题,和编译这个事情也非常像。所以我们也开始尝试做这个方面,能不能收集很多的数据,可以通过模型告诉我们接近最优的BPU架构配比是什么。当整个编译器和芯片基本定了之后,通过NAS在一个特定芯片上搜索出最优的模型结构。
总的来说就是一个闭环:算法模型结构搜索、BPU架构搜索、RL编译优化,三者都是互相依赖的过程。通过算法、编译器、架构设计三者相结合,在软硬结合极致优化的同时,经数据驱动实现自动化验证,持续寻找BPU架构最优解,驱动智能进化“加速度”。
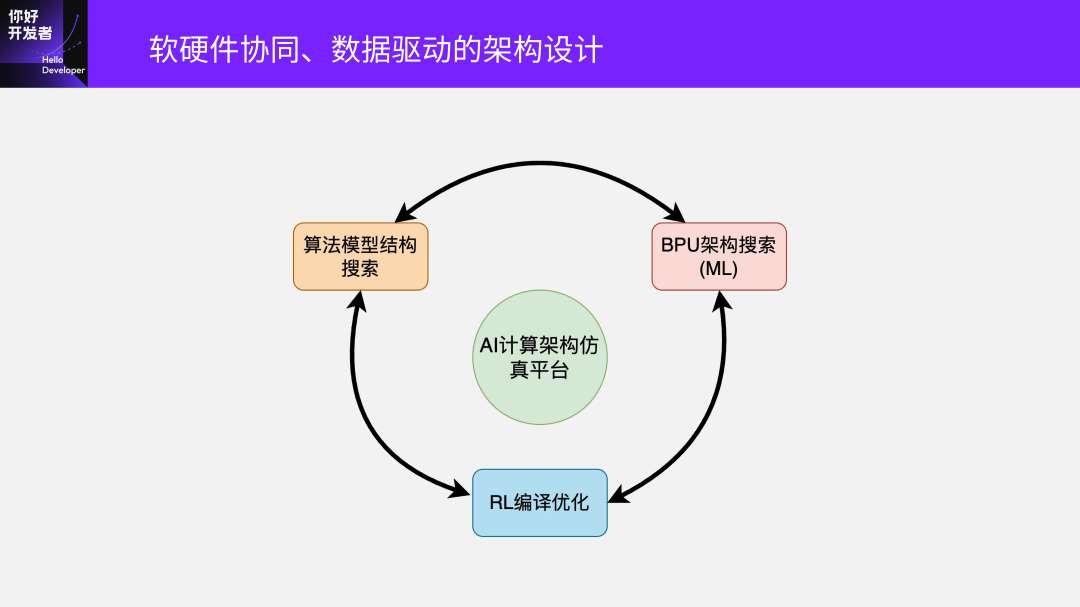
比如你要做算法结构的搜索,就需要快速编译出一个结果,然后在BPU上尝试它的性能怎么样。它对编译的速度、时间,还有编译优化的效果,都提出了非常高的要求。在这个闭环中你是可以锁定任意两个来找另外一个的最优解。为此,我们也搭建了一个计算架构的仿真平台做这方面的预研探索,极大提升智能计算架构BPU的进化迭代速度。
今天我讲的就是这些,谢谢大家!
","gnid":"9a6c368e2308e4ce8","img_data":[{"flag":2,"img":[{"desc":"","height":"460","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t014a5a4436bc11e78f.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t01b7f39c5af2130db7.jpg","width":"1080"},{"desc":"","height":"374","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t01076dd95c735ae25e.jpg","width":"1080"},{"desc":"","height":"430","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t01dc6b882a8565a027.jpg","width":"1080"},{"desc":"","height":"496","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t012e0d1ff997525e5e.jpg","width":"1080"},{"desc":"","height":"518","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t015b4c20836434edff.jpg","width":"1080"},{"desc":"","height":"630","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t019b2188e042652070.jpg","width":"1080"},{"desc":"","height":"520","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t012984772004b2bbb7.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t010285acea02e0943e.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t016c4c65622ccdafcc.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t0193a20fb7b7a7c8cf.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t018d09fbf2c7074d14.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t0101fb325e3666e15f.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t01c75b14cd619b9a8e.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t01493b642ce039c427.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t01e98dcb677561158a.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t014c26a52ca95b2a8d.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t0177f049aaa84481df.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t0113ad91aab9acd83c.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t012505f92c33f98017.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t0109ad6f1f679d950a.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t01935ead2b55f134ad.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t01c465522e5f775b7b.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t0112ab6bb06afe73c6.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t01b55f067da406fa3e.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t0122d3be58d925d2fa.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t01248bc319adcde87c.jpg","width":"1080"},{"desc":"","height":"178","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t010f26b8ed61f1ddbe.jpg","width":"297"},{"desc":"","height":"138","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t01d56648294dad16cc.jpg","width":"301"},{"desc":"","height":"270","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t01542e2a22c91b44ba.jpg","width":"615"},{"desc":"","height":"607","title":"","url":"http://p1.img.360kuai.com/dmfd/__60/t019f0fd6995b824f20.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p2.img.360kuai.com/dmfd/__60/t010dd93fc929206f48.jpg","width":"1080"},{"desc":"","height":"607","title":"","url":"http://p0.img.360kuai.com/dmfd/__60/t01cf6403d877ec5d90.jpg","width":"1080"}]}],"original":0,"pat":"art_src_3,fts0,sts0","powerby":"pika","pub_time":1704781860000,"pure":"","rawurl":"http://zm.news.so.com/c3f90761a6ac7a49645f0c8196cce068","redirect":0,"rptid":"f131eaf2c61c901f","rss_ext":[],"s":"t","src":"车东西","tag":[],"title":"超强干货!地平线编译器大牛的编译优化实践总结